

全球前十仿人机械手公司有哪些?



独家抢先看
灵巧手,作为机器人末端执行器的一种,其作用和人的双手相似,负责完成各种动作、抓持和操作任务。近年来,随着人形机器人产业的不断发展,灵巧手逐渐成为市场关注的热点之一。尽管人形机器人的整体发展尚处于探索阶段,但在仿生机械手领域,已有多家企业推出了成熟的商业产品。
1、Shadow robot
Shadow 灵巧手是世界上最为先进的五指机械手之一。它配备了20个直流电机(可选气动),拥有24个关节和超过100个传感器,能够以高达1KHz的运行频率运作。得益于其前所未有的精确度,这款机械手能够更精确地操作工具和物体。

此外,Shadow 灵巧手已经完全集成了ROS(机器人操作系统),使其能够作为研发工具,以及用于AI和机器学习测试的硬件平台。
2、Clone Robotics
Clone Hand是一款高度仿真的机械手,其特点在于采用了尖端的肌肉骨骼技术,该技术致力于模拟人类手臂的结构与功能。在Clone Hand的设计中,最为坚固的部分便是骨骼,而其他诸如肌腱、血管、脂肪以及皮肤等软组织则均采用柔软的面料进行模拟。

骨骼部分是由碳纤维材质打造而成,不仅具有出色的强度,同时也实现了成本的有效控制。此机械手采用液压作为驱动方式,内置了27个自由度,使其能够执行丰富多样的复杂手部动作,例如握紧拳头、灵活转动手腕等。
3、灵心巧手
灵心巧手(LINKERBOT)核心团队于2018年组建,专注于人工智能、机器人解决方案。灵心巧手推出的Linker Hand灵巧手产品最高拥有42 个自由度,成为全球自由度最高的商用灵巧手产品。每根手指最高可独立拥有9个自由度。
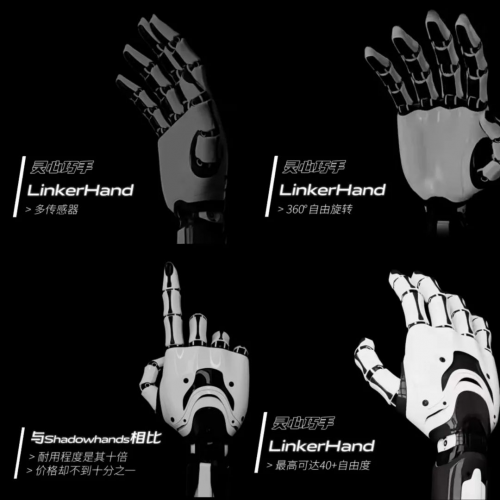
此外,其系列产品实现了360度自由旋转,这在全球灵巧手产品中尚属首创。除了高自由度,灵心巧手的产品还配备了先进的多传感器系统。包括高精度摄像头和电子皮肤,共同构成了一个全方位的视触觉感知模式。
4、因时机器人
因时机器人自2016年起便开始了其在机器人核心零部件及末端执行器领域的探索与创新。该公司的仿人五指灵巧手采用了领先的创新型直线驱动设计,不仅具备6个自由度和12个运动关节,更通过结合力位混合控制算法,实现了对手部动作的高度仿真。

其中,因时机器人的RH56DF3系列灵巧手以其出色的抓握力和适中的速度,非常适合用于机器人或假肢的精细抓取操作。而另一款RH56BFX系列灵巧手,因其速度快、抓握力稍逊于RH56DF3,但集成了力传感器,因此特别适用于弹奏钢琴及进行手势交互等需要高精度和高灵敏度的场景。
5、蓝胖子机器智能
深圳蓝胖子机器智能有限公司成立于 2014 年。DoraHand是一款模块化设计的多指灵巧手,采用模块化手指和手掌设计,每根手指都有独立的驱控和感知单元,可以独立工作,并且支持热插拔,这降低了维护难度并提高了实用性。

DoraHand拥有各类传感器共42个,每根手指和手掌配备的力触感知单元能够获取1024级的有效力信号,并且可以在感知力的大小的同时获取施力位置。它具有多个自由度,能够组合出多种手势,适应并满足大部分生活场景中的物体抓取需求。
6、思灵机器人
思灵机器人(AgileRobots)成立于2018年,其技术源自德国宇航中心机器人研究所(DLR/RMC)。该公司的产品Dexterity Hand在2020年完成了第一代开发,旨在服务、康复理疗、危险环境作业、空间探索等应用场景。这款机器人手采用了五指设计,模仿了人手的运动,由4个模块化的多关节手指和1个具有主动对掌功能的拇指组成。整个手掌集成了多种传感器,包括力传感器和位置传感器,这些传感器的融合使用可以提高抓取算法的精确性和适应性。

Dexterity Hand的驱动系统采用“直流伺服电机和二级减速器”方式,确保了手指和拇指的大力输出和快速响应,同时具备机械自锁功能。指尖的最大输出力可达10N,这使得其能够处理较重或需要较大力量的物体。因此,该产品可以满足多种应用场景的需求,为客户提供便捷、高效的服务。
7、强脑科技
BrainCo(浙江强脑科技有限公司)2015年创立于美国波士顿,并在中国浙江杭州、深圳均有分部,为哈佛大学创新实验室孵化的第一支中国创新团队。强脑科技此前一直从事非侵入式脑机接口技术研发与应用,今年开始研发适配人形机器人和机械臂的灵巧手。
据悉,其搭载“TS-F+多模态触觉传感器”的BrainCo智能仿生灵巧手,实现了更高灵敏度(力分辨率最高可达0.01N)、独有材质识别能力(可识别30多种不同材质)、空间感知维度(感知距离可达≥2cm),可实现对柔性、易碎物品的自适应力抓取,同时能精准完成握笔、倒水、抓鸡蛋等精细工作任务。
8、腾讯 Robotics X
在2018年,腾讯公司成立了Robotics X实验室,旨在推动机器人技术的创新。该实验室专注于多个研究领域,核心集中在机器人所必需的基础技术,如视觉和触觉等感知能力,以及支持机器人灵活运动、精细操作和智能行为的核心技术。
到了2023年4月25日,腾讯Robotics X实验室宣布了一项最新的研究成果——自研的机器人灵巧手TRHand。这款灵巧手在设计上采用了创新的高灵敏度柔性触觉传感器阵列,这些传感器分布在指尖、指腹和掌面,使得机器人能以更为精细的方式感知接触物的细微变化。此外,掌心部位还装备了微型激光雷达和接近传感器,增强了对周围环境的感知能力。为了确保操作的精确性,每个关节都配备了角度传感器,这样在抓取或操作物品时,机器人能够准确地获取自身各关节以及物体的状态信息。
9、傲意科技
上海傲意信息科技有限公司坐落于充满创新活力的上海张江高科技园区。该公司致力于探索和发展尖端的生物电传感器技术、先进的神经信号人工智能识别技术以及前沿的人机神经接口技术。公司的产品线着眼于打造高端智能设备,其中包括灵巧的机器人手部、高精度的智能脑电图设备、先进的智能仿生义肢、智能化神经康复训练系统以及创新的穿戴式外骨骼装置等。

公司的明星产品之一是ROHand灵巧手,这是一个高度灵敏的末端执行装置,其设计旨在模拟真实人体的手部运动。ROHand由手掌、手腕和五个具备运动能力的手指构成,配备了电机和一系列传动部件。每个手指均可在外部指令的控制下执行不同的动作。该设备拥有11个运动关节,并内置了6个电机驱动器和控制电路,为用户提供6个主动自由度。ROHand内部采用了PID电机控制算法,使得它能够精确模拟人类的手部动作,实现多种复杂的抓取任务。
10、帕西尼
帕西尼公司的DexH5 GEN1多维触觉灵巧手融合了仿生学原理与先进的触觉感知技术,旨在应对繁琐细腻的抓取与操作任务。这款灵巧手不仅能精确模拟人类手臂的多种运动,其内嵌的触觉传感器还能够感知所操作的物体,实现对力的精细控制。DexH5 GEN1运用微型伺服电缸来精准控制每一个关节的动作,从而达成类似生物体的抓握功能。与市场上其他的灵巧手不同,帕西尼DexH5 GEN1配备的ITPU触觉传感器,为其提供了丰富的感知信息,这是实现灵巧力控的关键。
灵巧手作为智能机器人与环境互动的重要部件,融合了深度仿生学、柔性感知技术、微机电系统(MEMS)以及先进高性能材料等多个领域的尖端科技。它是智能机器人技术迈向更高层次发展,实现跨越式进步的核心所在。随着众多资源和力量的不断整合与投入,灵巧手预计将成为机器人技术突破的重要领域之一,从而加快智能机器人在多个领域的广泛应用和进步。



